<!-BY_DAUM->
PMDG 737NGX를 기준으로 몇가지 유용하면서도 재미있는 정보들을 모아봤습니다.
간단하면서도 재미있는 내용들을 위주로 오랫동안 한번 작성하려고 적어두었던 내용들을 모아서 올립니다.
APP 버튼
일반적인 ILS 어프로치에서 Localizer와 Glide Slope이 잡힌 후 APP 버튼만 눌러줍니다.
VOR LOC 버튼은 LOC Only 접근시 사용합니다. (사용하면 안된다는 뜻이 아닙니다.)
평소 LOC 정렬 이후 APP를 누르는 식으로 비행했다면 그대로 행해도 무관합니다.
플랩 운용
에어버스와 달리 737 기종은 플랩의 단계가 1 - 2 - 5 - 10 - 15 - 25 - 30 - 40으로 매우 많은 단계가 있습니다.
하지만 통상적인 운항시에는 1 - 5 - 15 - 랜딩 플랩(30 or 40)의 다섯가지 플랩만 사용하게 됩니다.
왜 이렇게 많은 플랩 각도를 지금까지 유지하고 있는지는 정확히 알 수 없지만, 플랩 2의 경우 737-200에서 사용하던
각도이며, 플랩 10과 25는 이륙시 사용가능한 설정입니다. 플랩 15는 싱글 엔진 또는 비상착륙시 사용됩니다.
실제의 경우 이륙시에는 대부분의 항공사가 플랩 5를 사용하며, 플랩 1을 사용하는 곳도 꽤 된다고 합니다.
이륙시 : 플랩 5 (이륙 플랩) → "5"를 지날 때 혹은 V2+25를 지날 때 플랩 1 → "1"을 지날 때 플랩 Up
착륙시 : 플랩 Up → "UP"을 지날 때 플랩 1 → "1"을 지날 때 플랩 5 → ( G/S Alive : 기어 다운, 점등 확인 후 )
→ "5"를 지날 때 플랩 15 → "15"를 지날 때 랜딩 플랩
이착륙시 이 참조지점을 지났다고 해도 바로 플랩을 변경해야 한다는 것은 아닙니다.
다만 기체의 운용에 크게 관여하는 속도에 대한 정보를 전달한다는 목적이기 때문에, 이륙시 V2+25를 지났다고 해서
반드시 플랩을 1로 올려야 하는 것은 아니며 상승각이나 공항의 이륙 절차, 필요 상승률 등 여러 요인에 따라 플랩 5를
유지한체 꽤 높이 상승하는 경우도 있고, 거의 이륙하자마자 플랩을 접기 시작하는 경우도 있습니다.
하강 및 수평비행시에도 이 기준 속도보다 높다고 해서 플랩을 내리면 안되는 것이 아니며, 승객들의 편안함을
위해 미리 내릴 수 있습니다. 스피드 테잎 위쪽의 빨간 경계속도 내에서 말이죠.
실제 운항을 해보면 스피드 테잎의 참조 플랩 속도를 지날 때 플랩을 변경하도록 보기 쉽게 적혀있지만, 실제로는
플랩 조작 후 다음 플랩의 Maneuvering Speed로 속도를 조절한 후 다음 플랩으로 조작하는 식으로 운용됩니다.
즉, 플랩 5도를 내렸다고 해서 무조건 다음 플랩 속도로 감속하는 것이 아니라, 필요한 경우 SPD INTV 버튼 등을 이용해
기수가 너무 들리지 않도록 충분한 속도를 유지하며 비행하다가 감속을 해나가는 식으로 운용하면 되겠습니다.
즉 플랩 5도를 선택하면 이후 VNAV가 자동으로 다음 플랩 속도인 VREF+20 ("15"라고 적혀진 속도와 같음)를 선택하고
감속이 시작됩니다. 하지만 공항의 특성상 이후의 비행 거리가 꽤 많이 남아있다면 지체없이 SPD INTV 버튼을 눌러
플랩 5에 적합한 속도로 비행하다가 G/S를 잡을 즈음 다시 플랩 절차를 이어나가면 된다는 것입니다.
Maneuvering Speed는 항공기가 해당 속도에서 40도까지의 뱅크를 포함한 자유로운 움직임을 보장하는 속도인데,
플랩의 전개도 이와 밀접한 관계가 있습니다. 참고용으로만 이미지를 첨부합니다. (자세한 내용은 저도 몰라서;;)
(메뉴버링 스피드 구간 : 플랩 5 이후부터 상단의 빨간 스피드 테잎 아래에 가느다란 노란 선으로 표시되는 부분.)

* 출처 : PMDG 737 NGX - Crew Training Manual
IAF, IF, FAF
공항에 ILS 착륙을 하면서 흔히 볼 수 있는 표시중에 CI, FI, RW와 같은 표시가 있습니다.
뒤쪽에 활주로 번호가 붙어 CI32, FI32, RW32같은 식으로 접하게 되는데요, RW는 Runway의 약자로써 쉽게 활주로라고
예상할 수 있는데 반해 나머지는 자주 보아왔음에도 불구하고 딱히 떠오르는 용어가 없을 것입니다.
이 용어들은 한개의 활주로에 한가지 접근방법만 있는 경우와 그렇지 않은 경우에 따라 조금 바뀌는데, 플심에서 자주 이용하는
대부분의 공항들은 한가지 이상의 접근법을 가지고 있는 경우가 일반적이므로, 그에대한 설명을 찾아보면 다음과 같습니다.

C( ) – final approach course fix
F( ) – final approach fix
I( ) – initial approach fix
( )I – ILS
( )D – VOR/DME
( )N – NDB
즉, 우리가 흔히 보게되는 CI는 최종 접근각으로 선회 및 정렬을 시작하는 곳이며, FI 는 최종 접근 지점, 즉 FAF입니다.


위 그림은 구글링을 하다가 잘 정리된 사이트에서 본 것인데, 주소는 잊어버렸습니다. -_-;
Feeder Route는 항로의 마지막 Fix에서 IAF로 이어지는 곳, 즉 흔히 우리가 사용하는 트랜지션 부분이 됩니다.
일반적으로 항로에서 IAF를 통해 공항에 접근하게 되는데, 이 때 반드시 IAF를 거쳐야 하는 것은 아니며
실제로 많은 공항들은 IF 지점으로 접근이 유도되는 차트를 사용하고 있습니다. (FAF는 안됨)
FAF에서는 착륙에 필요한 모든 준비가 끝난 상태로 균일한 하강률과 고정된 자세와 지정된 하강각으로 최종 접근이
이루어져야 하는 지점입니다. 일반적으로 IF와 FAF 구간에서 랜딩 플랩과 VRef를 셋팅하기 시작합니다.
FAF 이후에는 MAP 혹은 MAPt 이라는 지점이 하나 더 있는데, Missed Approach Point를 의미합니다.

* 출처 : 국토해양부 AIP
Aircraft Category
위의 차트 하단부를 보면 카테고리별로 참조 수치가 다른 것을 볼 수 있습니다.
우측의 A B C D는 활주로가 아닌 항공기의 카테고리인데, 여러가지 속도에 따라 분류됩니다.
☞ 위키 링크 ☜
카테고리 A에 해당하는 기체는 세스나 같은 경비행기가 되겠고, 카테고리 B에는 E120, ATR 42/72 등이 해당됩니다.
카테고리 C에는 B737, A320, B757 및 B767 등이, 카테고리 D에는 B747, B777, A330 및 A340 등의 대형기가 속합니다.
카테고리 E는 전투기 등이 속하는 것으로 아는데, 지금은 퇴역한 콩코드가 이 등급이었다고 합니다.
Cost Index
모든 항공사는 운용중인 비행기들이 정해진 연료량을 가지고 가장 긴 거리를, 가장 짧은 시간 안에 도달하는 것을 원합니다.
근본적으로 연료를 적게 쓰면서 빨리 날고자 하는 것은 똑같이 중요하며, 어느 한쪽이 커지면 반대쪽이 줄어들겠죠.
따라서 이 사이에서 가장 효율적인 순항속도를 찾아야 하고, 이것이 몇몇 과정을 거쳐 Cost Index로 사용됩니다.
- 항공기가 너무 느리게 날면 시간당 소비량은 줄겠지만 추가로 비행하는 시간이 길어집니다.
- 항공기가 너무 빠르게 날면 시간당 소비량이 커지지만 전체 비행시간이 줄어듭니다.
이런 것들을 고려해 각 항공기에 맞게 찾아낸 가장 효율적인 값이 바로 MRC (Maximum Range Cruise) 입니다.
모든 항공기에서 Cost Index에 0을 입력하면 바로 MRC로 비행하는 것이 되며, 속도가 아주 느립니다.
이렇게 연료를 최고 효율로 사용하는 MRC에서 연료 효율을 1% 잃는 대신 3~5%의 순항속도를 높일 수 있는 방법을
LRC (Long Range Cruise)라고 하며, 대부분의 항공사들이 이 MRC와 LRC 사이의 값을 사용합니다.
두번째 표에서 볼 수 있듯이 기체마다 CI 값의 입력 범위가 다르며, 대부분 MRC에 가까운 값을 많이 사용합니다.
유럽의 저가 항공사들은 737NG의 경우 5를 많이 사용하며, 심지어 2나 1을 사용하는 곳도 있습니다.
(일반적으로 단거리 구간은 낮게, 장거리 비행은 다소 높여 사용합니다.)


* 출처 : Boeing.com - Fuel Conservation Strategies: Cruise Flight
Autoland - LAND 3
일반적으로 B737급 이상의 상용 항공기로 착륙시에는 오토파일럿을 2~3개 활성화 한 상태로 착륙하게 됩니다.
이는 착륙 도중에 한개의 오토파일럿 컴퓨터가 고장나더라도 안전한 착륙을 보장하기 위한 장치인데요,
B737의 경우 LAND 3 AUTOLAND까지 가능합니다. 간단해 보이지만 이게 꽤 헷갈리는 내용입니다.
통상적인 플라이트 시뮬레이터의 ILS 종류는 한가지 뿐이고, 디폴트기 역시 ILS만 지원할 뿐
오토 랜딩은 상용기에서 지원되기 시작했습니다. 하지만 이 역시 한가지의 자동착륙만 있었죠.
좀 더 세분화 된 오토 랜딩은 윌코 767부터였는데, 현재 가장 현실적인 모습을 보여주는 것은 역시 737NGX 입니다.
다소 복잡할 수도 있지만 재미있는 내용이므로 간단하게 조금 더 알아보도록 하겠습니다.
★ Fail Passive Mode (기능 고장시 오토파일럿을 포기한다는 정도의 의미)
듀얼 오토파일럿으로 착륙하는 도중 한개의 신호를 받을 수 없게 되면(오토파일럿이나 안테나의 고장 등)
수동 착륙으로 전환해야 합니다. 플라이트 시뮬레이터에서는 한개의 오토파일럿만으로도 완벽한 착륙을 할 수
있지만 실제로는 안전상의 이유로 이를 금지하고 있습니다. ILS 신호와의 오차가 커지기 때문입니다.
★ Fail Operational Mode (기능 고장시에도 오토파일럿을 유지한다는 정도의 의미)
세개의 오토파일럿으로 착륙하는 도중 한개의 신호를 받을 수 없게 되더라도 자동 착륙이 가능합니다.
이 상황에서는 등급이 낮아져, 위의 Fail Passive 모드와 동일한 등급으로 취급되어집니다.
(Fail Passive 모드는 오토파일럿이 유지되고 있는 상태입니다.)
737NGX에서 이 모드를 활성화 시키려면 CDU MENU의 PMDG SETUP - AIRCRAFT - EQUIPMENT 옵션에서
COLLINS MCP, ISFD, FAIL OP 세 항목들이 모두 선택되어져 있어야 합니다. (ISFD가 세번째 항법 소스가 됨)
* ISFD = Integrated Secondary Flight Display


① 한개의 Autopilot
자동 착륙이 불가능하며, 결심고도 이전에 오토파일럿을 해제하고 수동 착륙으로 전환해야 합니다.
② 두개의 Autopilot (Fail Passive)
자동 착륙이 가능하지만 Flare만을 지원하며, Rollout을 지원하지 않으므로
터치다운 직후 오토파일럿을 해제, 파일럿이 직접 기체를 제어해야 합니다.
1500FT 미만에서 PFD 상단에 CMD가 표시됩니다. (CAT II)
③ 세개의 Autopilot (Fail Operational)
정확하게는 듀얼 오토파일럿과 한개의 백업 Inertial Source 입니다. Flare와 함께 Rollout 모드를 지원하며,
최종 접근중 한개의 Inertial Source가 사용 불가능 상태가 되어도 백업 소스(ISFD)가 이를 대체하여
LAND 2 Autoland가 가능합니다. 1500FT 미만에서 PFD 상단에 LAND 3가 표시되며, (CAT III)
2개의 소스만 사용 가능한 경우 다운그레이드되어 LAND 2가 표시됩니다. (CAT II)
(하지만 CAT III의 최저 기준과 딱 맞게 되므로 CAT IIIa Autoland를 계속 이행할 수 있습니다.)
단, 애초에 두개의 Autopilot만 있는 경우에는 LAND 2가 아닌 CMD가 표시됩니다.
윌코 767의 경우 상황에 따라 CAT3 상황에서도 LAND 2가 표시되는 경우가 있는데, 정확한 내용은 모르겠네요.
세계의 많은 저가항공사들은 대체로 Fail Passive 등급인 기체가 많다고 합니다.
Fail Operational 등급을 충족시키려면 많은 비용이 들어가기 때문이 아닐까 싶습니다.
SPD 버튼
수동 착륙시에도 Auto Thrust를 사용하다가 플레어와 함께 Retard 조작이 이루어지는 Airbus와는 달리
Boeing은 기본적으로 수동 착륙시 Autopilot과 Autothrottle 모두 수동 조작을 기본 방침으로 하고 있습니다.
그런데 이 Manual Flight에도 속도 제어에는 두가지 방법이 있습니다.
조종간을 이용한 기체의 자세는 한가지 방법 뿐이지만 쓰로틀을 조작하기 위한 방법은 두가지가 존재합니다.
우선 대부분의 실제 항공사들과 플라이트 시뮬레이터 내에서 주로 이용되는 방법으로 Autothrottle을 끄는
방법입니다. 이 경우 착륙절차를 진행하다가 Go Around가 발생 시 조종사가 직접 쓰로틀 레버를 끝까지
밀어주어야 합니다.
그리고 다른 방법은 Aotuthrottle은 유지한 채 SPD 버튼을 눌러 끈 상태로 접근하는 방법인데, 항공사의
방침이나, 시정이 좋지 않은 경우 사용되는 것이 아닐까 생각됩니다. 이 경우 Go Around가 필요한 경우
TO/GA 버튼을 누르면 기체가 즉시 상승 출력과 자세로 진입하기 때문에 수동 조작때 보다는 조종사의
업무 부담을 덜어주게 되어 보다 안전한 복행 절차를 수행할 수 있게 해줍니다.
위 동영상을 보면 Autopilot 해제 후 부기장에게 SPD 버튼을 눌러줄 것을 요청합니다. SPD 버튼을 누르면
VNAV PATH 하강시처럼 PFD 출력 모드 알림부분이 흰색 Arm 으로 바뀌고, 파일럿이 직접 쓰로틀을 조작할
수 있게 됩니다. (https://youtu.be/dXV7IB3StGA)
또한, SPD 모드를 활성화 한 상태로 메뉴얼 착륙을 해도 자동착륙때와 마찬가지로 Flare시 Idle 출력으로
감소되는 모습을 볼 수 있는 경우도 있는데요, 테스트 결과 이는 ILS 자동착륙시에만 프로그램 내부적으로
동작하도록 설정되었기 때문에 동작하는 것이며 실제로는 동작하지 않습니다.
단, B777은 방침이 바뀌었는지 수동 착륙시에도 Autothrottle을 사용하고 있습니다.
* 정확한 내용은 아니며, 이러한 방법도 때때로 사용된다는 정도로 읽어주세요.
SPD / ALT INTV (Intervention) Switch
기존 상용기에서도 다른 구현방법으로 존재하던 기능이지만, 737NGX에서는 보다 상세히 구현된 기능입니다.
Intervention은 말 그대로 간섭하다 라는 뜻인데요, 두가지 모두 VNAV가 활성화된 상황에서 사용됩니다.
크게 어려울 것이 없지만 잘 알려지지 않은 기능인듯 하여 메뉴얼에 있는 내용을 적어보고자 합니다.
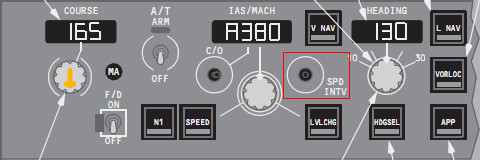

VNAV climb 상태에서 누른 경우
DERATE와 FLEX Temp

보통 비행 전 FMC를 설정하면서 N1 Limit 페이지를 매번 보게 되는데요,
크게 건드릴 내용이 없어 바로 TAKEOFF 페이지로 넘어가게 됩니다.
인터넷에도 관련된 내용이 많지만 간단하게 737NGX의 메뉴얼에 있는 내용을
그대로 옮겨보면,
"Reduced thrust takeoff는 EGT(배기 가스 온도)를 낮춰주고, 엔진 수명을
늘려주며, 성능 제한되는 경우 및 NADP(저소음 운항절차)를 사용할 수 있을
경우에는 언제나 사용된다."
EGT가 낮아진다는 말은 엔진의 코어 온도가 낮아진다는 뜻이고, 결국 엔진의
수명 뿐 아니라 정비에 드는 비용도 줄일 수 있게 됩니다. 또한 지형의 제한으로
인해 NADP 절차를 이용할 수 없는 경우를 제외하고는 (대부분의 중대형 공항이
NADP를 사용하므로) 거의 항상 사용한다고 보면 되겠습니다.
위의 그림은 Upper Engine Display의 N1 제한치와 CDU의 N1 LIMIT 페이지를 함께 본 모습입니다.
현재는 기본적인 출력인 26K Full Thrust가 선택되어져 있습니다.


왼쪽의 그림은 TO-2가 선택된 모습이며, Engine Display에 TO 2가 표시됩니다.
(TO-1은 10%, TO-2는 20%의 출력 감소가 이루어집니다.)
오른쪽의 그림은 TO-2가 선택된 상태에서 다시 외부 온도를 40도로 설정한 모습니다.
일단 이륙 출력이 감소된 후에는 해당 N1보다 높은 출력을 사용하면 안되기 때문에 이륙 후
상승에 필요한 출력이 이륙시 설정된 출력보다 높다면 CLB 출력 역시 현재 설정된 N1보다
낮은 출력이 자동적으로 선택됩니다.
① Fixed Derate
CDU 화면에서 TO-1, TO-2를 선택하는 것을 Fixed Derate라고 부릅니다.
위의 사진을 기준으로 예를 들면, 원래 장착되어진 26K의 출력을 낼 수 있는 엔진임에도 불구하고
최대 N1의 출력을 22K로 봉인하겠다는 의미가 됩니다. 즉 A/T이 FMC와 연동되어 비행하는 중에는
이 N1의 출력 이상으로 쓰로틀 레버가 올라가지 않습니다.
이는 앞서 설명한 연료 절감과 엔진 수명의 향상을 위해 사용되기도 하지만, 특정 공항의 NADP에서
최대 엔진 출력 레이팅을 제한하거나, 실제로 낮은 등급의 엔진이 장착되었을 때에도 사용됩니다.
즉, 어떤 항공사에서 향후 더 작은 비행기에 장착하기 위해 들여온 22K 출력의 엔진을 조금 더 큰
기체에 장착해서 사용할 경우, 이 항목을 선택해줌으로써 EEC가 마치 실제로 이 엔진이 장착된
것처럼 운용을 할 수 있도록 해줍니다. (정확한 내용이 아닐 수도 있음)
② Assumed Temperature (FLEX)
제트엔진은 특정 온도에서 보장되는 운용 한계가 있습니다. 즉 표준 기압 상태의 15℃인 상태에서
100의 출력을 내지만, 고도가 올라가거나, 기온이 높아질수록 공기의 밀도가 변화됨에 따라
점차적으로 보장되는 출력이 줄어듭니다. 따라서 비행기는 이러한 환경에 따라 자동으로
최대 출력을 조절 또는 제한하게 되는데요, 바로 이점을 이용해서 출력을 제한하는 것입니다.
SEL/OAT란에 현재의 온도보다 높은 온도를 입력함으로써, 컴퓨터가 현재 외부 온도가 더 높기
때문에 그만큼 엔진의 운용 한계를 낮추게 되는 것입니다. (Airbus 기종에서는 FLEX Temp)
그런데 여기서 가장 문제가 되는 부분은 바로 어떤 Derated Thrust와 몇도를 입력하느냐 입니다.
실제 항공기들은 미리 계산된 값들을 넘겨받아 입력하면 되지만 플심에서는 쉽지 않죠. 물론 관련
내용을 배워서 매 비행시마다 계산할 수도 있겠지만 이쯤 되면 재미보다는 고통이 느껴질법 합니다.
상용 프로그램중에 TOPCAT (Take-Off and Landing Performance Calculation Tool)이라는
프로그램이 있습니다. 관련 리뷰 등을 보시면 기체와 공항 코드, 날씨 등을 입력하여 이/착륙과
관련된 상세한 정보를 얻어낼 수 있으며, 그중 Reduced Thrust도 포함되어 있습니다.
하지만 개인적으로는 이런 내용을 통해 매번 결과값을 얻어내는 것 보다는, 플심의 경험을 통해 평상시
비행하던 기억을 활용해 출력을 조절하는 정도로 즐기는 것이 무난하다고 생각됩니다.
(짧은 활주로나 높은 해발고도에 위치한 공항 등에서는 최대 출력으로, 승객과 연료량이 적거나
활주로가 충분히 긴 곳에서는 20~40도 정도로 설정하는 등)
③ Bump

마지막으로 맨 아래의 Bump라는 출력이 있는데요,
실제로 장착된 엔진의 최대 출력인 27K를 선택한
모습입니다.
통상적인 최대 운용 출력보다 한단계 더 높은 것인데,
이륙 중량이 매우 무거운 상태에서 높은 지형의 지역을
통과해서 이륙해야 하는 경우 등 추가적인 출력이
필요한 경우에 사용됩니다.
미국의 몇몇 공항들은 만석인 경우 이 출력이 필요할만큼
주변 표고가 높은 곳이 있기 때문에 그 지역을 통과하는
활주로에서 이륙하는 경우 이 설정을 사용한다고 합니다.
참고로 TO-B 출력에서는 외부 온도를 설정할 수 없습니다.
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
사실 PMDG 737NGX의 메뉴얼이 워낙 디테일해서 메뉴얼 뿐 아니라 관련 내용을 찾아보며 새롭게
배운 내용들이 아주 많습니다. 저역시 비행을 따라하는 식으로 까페에서 많은 내용을 배웠지만 결국
따라하면서도 이 기능이 무슨 역할을 하기 때문에 누르는지 궁금하다면 메뉴얼과 인터넷 검색이
가장 다양하고 많은 답변을 가져다 주었습니다.
생각 같아서는 에어 컨디셔닝과 유압에 관한 내용도 간략하면서도 재미있게 몇자 적어보고 싶었지만
일단 여기까지 작성한 것도 몇달동안 생각만 하다가 겨우 작성한 것이라 이쯤에서 마무리를 하도록
하겠습니다. -.-;;
항상 말미에 달리는 같은 내용이지만 저역시 여기저기 기웃거리며 얻은 정보들을 기준으로 작성한
내용이므로 실제와는 다른 내용이 있을 수 있습니다. 틀린 내용이나 보충할 점 등은 지적해 주시면
그때 그때 보완하도록 하겠습니다.
강좌 비행 문서뿐 아니라 질문 답변 게시판, 인터넷, 메뉴얼 등을 골고루 참조하였습니다.
까페에 중복되는 내용도 있을 수 있으며, 앞서 관련 지식을 공유해 주신 분들께도 감사드립니다.
'Daum FS' 카테고리의 다른 글
| [스크랩] 재미로 읽는 Hydraulic System (0) | 2014.08.13 |
|---|---|
| [스크랩] 재미로 읽는 Air Conditioning (0) | 2014.08.13 |
| [스크랩] 737NGX 단축키 설정 (0) | 2014.08.13 |
| [스크랩] 737NGX 새로운 기능들 (0) | 2014.08.13 |
| [스크랩] 상용기 선택 가이드라인 (0) | 2011.10.24 |